归纳总结在gpu上试的流体模拟,主要总结gpu gems1上的一篇文章,在2d平面上模拟流体实现;
前置理论知识
通常采用笛卡尔坐标系下的速度矢量场来描述流体,并且对流体进行各向同性、不可压缩物理假设,通过求解NS流体运动方程来进行速度场的解算;
NS方程介绍
流体微元的运动方程仍然遵守牛顿第二定律,即:
$$ F=ma $$
转换为流体方程则是:
$$ \rho \frac{D \mathbf{u}}{D t} = \rho \left(\frac{\partial \mathbf{u}}{\partial t} + (\mathbf{u} \cdot \nabla) \mathbf{u}\right) = -\nabla p + \mu \nabla^2 \mathbf{u} + \rho \mathbf{f} $$
该方程称之为NS方程,其中 $\rho$ 即为牛顿公式中的 $m$ ,括号中的和即为流体微元的加速度,等号右边即为流体微元所受的外力;
将该方程写为计算常用形式,即为:
$$ \frac{\partial \mathbf{u}}{\partial t} = - (\mathbf{u} \cdot \nabla) \mathbf{u} -\frac{1}{\rho}\nabla p + \mu \nabla^2 \mathbf{u} + \mathbf{f} $$
其中左侧即为速度对时间偏导,为流体微元的当地加速度,右侧第一项为对流项,该项描述了空间对速度的影响,该项描述了流体微元延速度进行空间传递的特性,第二项为压力项,对应流体微元的表面压力,第三项为粘性项,对应流体微元的表面剪切力,针对欧拉方程该项为0,第四项为外力项,对应流体微元的体积力,如重力;
同时不可压缩流体虚满足散度为0的条件,即:
$$ \nabla \cdot \mathbf{u} = 0 $$
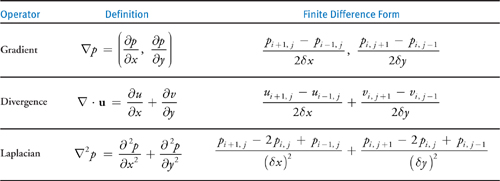
以上公式中用到的算子符号,其物理含义、展开形式与有限微分形式表示如下:
改写NS方程
针对2d下的NS方程,需要求解速度 $\mathbf{u_x}$ 、 $\mathbf{u_y}$ 以及压力 $p$ 三个变量;
直接求解此三项并不是很直观,可以引入Helmholtz-Hodge Decomposition来帮助求解;
Helmholtz-Hodge Decomposition理论证明了一个矢量场可以分解为一个无散场与一个无旋场,切两场相互正交;
刚好流体速度散度为0,压力的梯度的旋度为0,因此可以用一个新的矢量场来表示,如下:
$$ \mathbf{w} = \mathbf{u} + \nabla p $$
由于流体速度散度为0,对上式应用散度计算可得:
$$ \nabla\mathbf{w} = \nabla^2 p $$
$\nabla^2 x = b$ 形式的方程称之为泊松方程,很明显上式是一个泊松方程;
将上式中的 $\nabla^2 p$ 采用离散数值替换后,求解 $P$ 就变成了求解一个大型数组,该方程就变成了 $Ax=b$ 的形式,刚好求解该方程可以使用计算方法中的Jacobi迭代法,该方法也便于使用GPU实现。
我们知道矢量是可以分解与投影的,就初中学的向量分解;
对 $\mathbf{w}$ 矢量场应用投影算子,投影至$\mathbf{u}$方向,可得:
$$ \mathbb{P}\mathbf{w} = \mathbb{P}\mathbf{u} + \mathbb{P}\left(\nabla p\right) $$
根据Helmholtz-Hodge理论, $\mathbb{P}\mathbf{w} = \mathbb{P}\mathbf{u} = \mathbf{u}$ ,因此 $\mathbb{P}\left(\nabla p\right) = 0$ 。
将该投影算子应用到NS方程上,可得
$$ \mathbb{P}\frac{\partial \mathbf{u}}{\partial t} = \mathbb{P}\left(- (\mathbf{u} \cdot \nabla) \mathbf{u} -\frac{1}{\rho}\nabla p + \mu \nabla^2 \mathbf{u} + \mathbf{f}\right) $$
根据Helmholtz-Hodge理论,可得:
$$ \frac{\partial \mathbf{u}}{\partial t} = \mathbb{P}\left(- (\mathbf{u} \cdot \nabla) \mathbf{u} + \mu \nabla^2 \mathbf{u} + \mathbf{f}\right) $$
最终上式就是我们最终所要应用的迭代公式,将上式中的对流项、扩散项、外力项分别用符号 $\mathbb{A}$、$\mathbb{D}$、$\mathbb{F}$ 来表示,最终的迭代方程可简写为:
$$ \mathbb{S} = \mathbb{P} \circ \mathbb{F} \circ \mathbb{D} \circ \mathbb{A} $$
迭代过程逐项分析
假如知道了当前时刻的速度矢量场,如何计算 $\delta t$ 时间后的速度矢量场?
对流项
首先计算对流项的影响,其展开形式为:
$$ \frac{\partial \mathbf{u}}{\partial t} = -(\mathbf{u} \cdot \nabla) \mathbf{u} = -\mathbf{u_x}\frac{\partial \mathbf{u}}{\partial x} - \mathbf{u_y}\frac{\partial \mathbf{u}}{\partial y} $$
将上式中等号右侧移到左侧可得:
$$ \frac{\partial \mathbf{u}}{\partial t} + (\mathbf{u} \cdot \nabla) \mathbf{u} = \frac{D \mathbf{u}}{D t} = 0 $$
此方程即为速度对时间的全导数,即拉格朗日视角下,速度的变化量为0。
因此我们可以切换到拉格朗日时间下来计算,针对每一个流体微元,我们可以根据上一时刻,流动到当前微元的微元的速度来替换,即:
$$ \mathbf{u} \left( \mathbf{x}, t + \delta t \right) = \mathbf{u} \left( \mathbf{x} - \mathbf{u} \left(\mathbf{x}, t\right) \delta t, t\right) $$
这中做法在CFD中称之为半拉格朗日法,实际上针对其他物理量的ns方程,这里速度就可以切换为其他物理量,如密度,温度等。
扩散项
$$ \frac{\partial \mathbf{u}}{\partial t} = \mu \nabla^2 \mathbf{u} $$
从方程的形式能看出该方程为泊松方程,针对扩散项可以使用显式差分法直接带入进行计算,但为了数值稳定性,使用Jacobi迭代法可能是一个更好的选择,对应公式如下:
$$ x^{(k+1)}{i,j} = \frac{x^{(k)}{i-1,j} + x^{(k)}{i+1,j} + x^{(k)}{i,j-1} + x^{(k)}{i,j+1} + \alpha b{i,j}}{\beta} $$
这里 $x$ 与 $b$ 都表示速度,但是 $b$ 表示上一环节(对流项)计算所得到的速度,$\alpha$ 为dx * dx / (Viscosity * Timestep), $\beta$ 为 $4+\alpha$。
外力项
由于是2维空间上的计算,因此不用考虑体积力;常作为交互输入的外力控制,为了简单计算,可以直接修改流体速度的大小;
投影计算
经过以上步骤会得到一个矢量场,该场其实就是 $\omega$,将该场进行投影后,即可获取最终我们需要的速度场。
如何进行投影,实际上就是将该速度场,减去无旋场,即为我们索要获取的速度场;
实际上是否需要进行投影计算,可以作为一个可选择项,在战神风力场的使用中,就关闭了投影计算。实际上,如果不需要保证流体的不可压缩性,可以不进行投影计算,这样会带来更好的性能。
而无旋场如何获取,需要先计算 $\omega$ 的散度,随后应用Jacobi迭代法来接泊松公式计算散度对应的压力,再计算压力的梯度即为我们需要的无旋场。
首先求解下式中的压力场:
$$ \nabla\mathbf{w} = \nabla^2 p $$
使用Jacobi迭代法可得:
$$ x^{(k+1)}{i,j} = \frac{x^{(k)}{i-1,j} + x^{(k)}{i+1,j} + x^{(k)}{i,j-1} + x^{(k)}{i,j+1} + \alpha b{i,j}}{\beta} $$
这里 $x$ 表示速度, $b$ 表示 $\nabla\mathbf{w}$ ,$\alpha$ 为-dx * dx, $\beta$ 为4。迭代以上方程即可求得 $p$。
现在 $\omega$已知, $p$ 已知,代入下式即可得到我们要求的速度场。
$$ \mathbf{u} = \mathbf{w} - \nabla p $$
代码实现过程
有了以上分析,便可得到代码实现过程为:
|
|